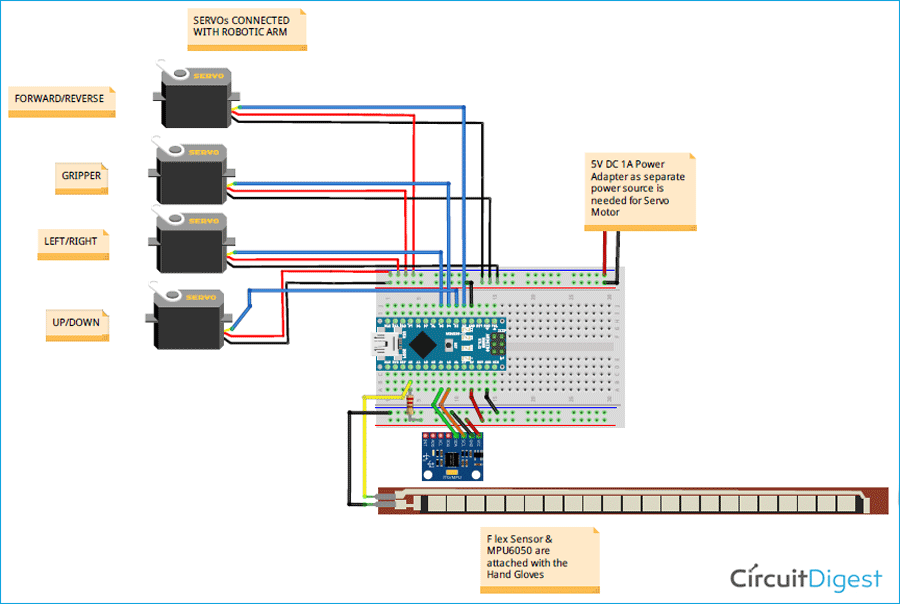
Robotic arm controlled with Arduino Circuit Diagram The RF Controlled Robotic Arm using an 8051 microcontroller is a versatile and engaging project that combines embedded systems, wireless communication, and robotics. This project not only provides hands-on experience in interfacing different modules but also offers a practical application of microcontroller-based systems in real-world scenarios.
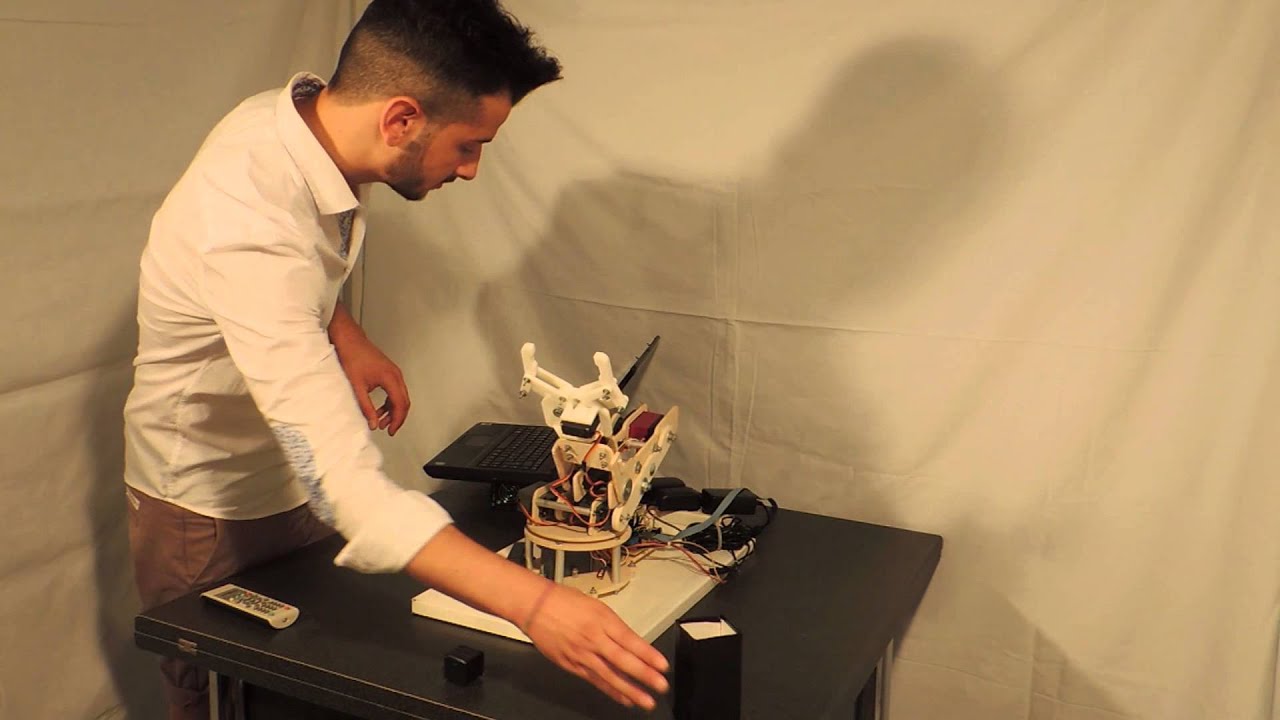
The project, Robotic arm is controlled by a mobile application known as BLYNK. It is free and easy to use for automation and IoT projects. In this project, multiple servo control different axes and rotation of the arm in a different directions. Components Required for IoT Robotic Arm NodeMCU Servo Motors Male-Female Headers Jumper Wires So in this tutorial let's build a simple Robotic Arm using ARM7-LPC2148 microcontroller for picking & placing an object by manual controlling few potentiometers. In this tutorial we will use a 3D printed robotic ARM that was built by following the procedure in thingiverse. The ARM uses 4 servo motor for robotic ARM movement.
Robotic Arm Control using PIC Microcontroller Circuit Diagram
This paper presents the development of robot arm control using an Arduino controller. The work involves the integration of Arduino microcontrollers and sensors to enable precise and dynamic control of a robotic arm. The proposed robot is controlled by 4 servo motors, the motors rotate left, right, front, and back. We have already built a Record and Play Robotic Arm using Arduino which could be trained to do a particular task and made to repeat forever. In this tutorial, we will use the industry standard PIC16F877A 8-bit Microcontroller to control the same robotic arm with potentiometers.

This paper focuses on model design, simulation and control of a five degree of freedom (DoF) robotic arm using servo motors. The robotic arm is controlled by a PIC 16F877A microcontroller and its main function is to generate pulse width modulation (PWM) signals which are applied to the servo motors for achieving the desired rotation angle. This STM32 Nucleo expansion board has a switching regulator to provide up to 3 A to 6 servo motors. It also translates a 3.3 V PWM signal from the microcontroller to 5 V for each of the servo motors, and has a power enable signal. A unique feature is its Wii Nunchuck connector. This makes it ideal for controlling a robotic arm, such as the EEZYbotARM MK2, using a reverse-engineered I2C Assuming that you have somehow got hold of your robotic Arm lets proceed into the project. Circuit Diagram The Complete circuit diagram for this PIC Microcontroller based Robotic Arm is shown below. The schematics was drawn using EasyEDA. The circuit diagram is pretty simple; the complete project is powered by the 12V adapter.